本文系网易新闻•网易号特色内容激励计划签约账号【智东西】原创内容,未经账号授权,禁止随意转载。

智东西(公众号:zhidxcom)作者 | 程茜编辑 | 心缘
智东西11月18日报道,最近,一件专利诉讼案颇受关注。主角是机器人领域声名赫赫的先进机器人设计公司波士顿动力,它状告竞争对手Ghost Robotics抄袭了自家的机器狗技术。
波士顿动力在提交给美国特拉华联邦地区法院长达110页的诉讼文件中指出,Ghost Robotics侵犯了其四足机器人Spot相关的7项专利,包括机器人自我扶正、爬楼梯、步态干扰、追踪器、驱动器等,都是机器人智能化升级中的关键技术。

▲波士顿动力和Ghost Robotics四足机器人外形对比(左为Spot,右为Vision 60)
相关专利包括:

波士顿动力专利诉讼文件:

▲波士顿动力提交的诉讼文件
波士顿动力专利诉讼文件链接:https://www.therobotreport.com/wp-content/uploads/2022/11/boston_d_v_ghost_robotics.pdf
“创新是波士顿动力的生命线。”波士顿动力公司发言人在发给外媒《机器人报告》(The Robot Report )的电子邮件中写道:“我们的机器人专家已在全球成功申请了大约500项专利和专利申请。我们欢迎新兴移动机器人市场的竞争,但我们希望所有公司尊重知识产权,当这些权利受到侵犯时,我们将采取行动。”
我们分别对这7项专利技术进行拆解,从中可以看到波士顿动力在解决机器人最具挑战性问题、推进先进技术研究方面的领先性。
一、648、791专利:掌握“自主权”,机器人摔倒后能自我纠正
其中648、791专利内容都为帮助机器人保持平衡。
该专利提供了帮助机器人自动扶正的示例系统和方法,可以适用于双足、四足甚至更多条腿的机器人。
机器人可以通过检测其底部与地面的相对位置,来确定自己正处于躺卧等不稳定状态,然后由相应计算装置发出让机器人执行第一动作的指令,让足式机器人回正。第一动作包括判断足式机器人的质心位置,确定每只腿和脚的位置,并根据其所处位置转移质心位置从而让足式机器人重新保持稳定。
随后,该专利的数据存储器可以判断第一动作后机器人是否已经返回稳定状态,如若不然,其就是发出执行第二动作的指令,包括让机器人的腿远离其本体,增加设备的重力势能来帮助平衡。
机器人会持续执行自我纠正动作,直到确定它不再处于不稳定位置为止。
专利内容链接:https://patents.justia.com/patent/9308648#claims(648专利)
https://patents.justia.com/patent/9662791(791专利)
二、869专利:转移重心、扭转关节,顺利爬上爬下楼梯
机器人在一些随机环境中运动时,可能会需要遇到需要精准判断腿部、脚部位置的情形。如果某一个部位执行过程中的环节有误差,机器人就会摔倒。因此,如何在爬楼梯等环境中协调自身相应部位的动作对于机器人而言十分重要。
该专利可以让机器人识别楼梯区域并做出响应。机器人的构成包括身体、左前腿、右前腿、左后腿和右后腿,每条腿又包括大腿和小腿部分,膝关节将大腿和小腿连接起来。
当机器人接收到其正面临一个或多个楼梯的图像数据时,上述这些部位都将参与到爬楼梯中来。
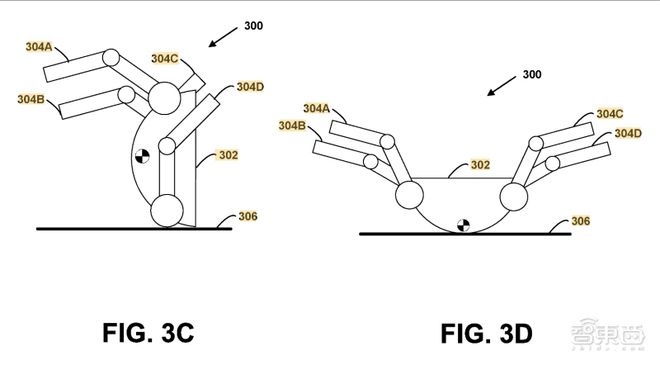
爬楼梯之前,该装置会让机器人的重心分布移向靠前位置,也就是左前腿和右前腿之一为主要支撑腿。爬楼梯时,机器人当前支撑腿与楼梯中台阶接触时,将其前支撑腿的膝关节朝向机器人身体,这样就可以减小支撑角大小,方便机器人进行下一步动作。
随后,机器人通过转变大腿和小腿部分的位置,就可以顺利爬上、爬下楼梯。

▲Vision 60在爬楼梯时会改变支撑角大小
专利详细内容链接:https://patents.justia.com/patent/11123869
三、588专利:脚底打滑时迅速站稳,地面反作用力校正误差
该专利主要应用于检测对机器人步态的干扰,让处于崎岖或不平坦地形的足式机器人的运动更加高效。其中,涉及检测机器人脚打滑、处理响应打滑和控制机器人的步态。
机器人的步态一般包括摆动状态和踏步状态,摆动状态的关键点包括机器人脚的目标摆动轨迹,其中最为关键的是轨迹的起点和终点。机器人在检测到有相应干扰后,就会在脚步到达目标摆动轨迹终点之前,使足部从摆动状态进入踏步状态。
此外,当机器人检测到其步态中的意外横向加速度,就可以通过控制腿的动作和位置控制其施加在地面上的力,在保持平衡的同时以所需的步态移动。
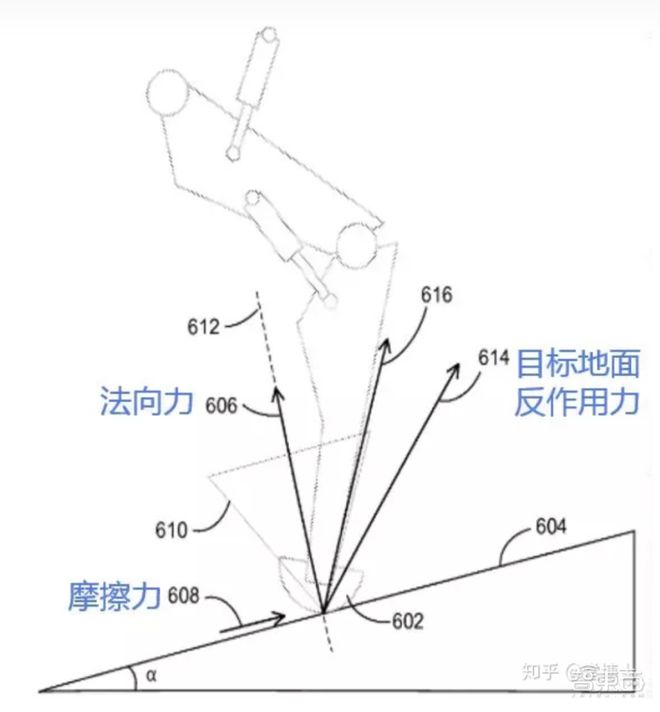
▲四足机器人脚接触地面时的力
其中,机器人可以确定其腿的位置和负载,让地面反作用力作用在机器人上以对抗和校正速度误差。
专利详细内容链接:https://patents.justia.com/patent/9387588
四、842专利:为面前楼梯建模,还能回避前方障碍物
该专利用于机器人感知到前方有楼梯,在靠近楼梯时,机器人的视觉系统会接收到相关图像数据,再将其传送至用户操控的机器人遥控器界面上,该遥控器可以显示图像数据和用于激活楼梯模式。

▲美国空军在基地测试Vision 60时遥控器界面的“楼梯模式”
当机器人接收到进入楼梯模式命令后,会根据台阶的宽度限制其相应摆动腿行进的步幅长度,使用专用于机器人爬楼梯的控制器来控制其腿部腾空和落地的过程。
该专利还包括与机器人通信的楼梯建模系统,建模系统可以接收与楼梯相邻机器人的传感器数据,找到相应阶梯的边缘来确定台阶高度。
此外,机器人可以有效绕开前方楼梯上的障碍物。识别障碍物后会沿着其回避路径移动,同时,这一路径会保持在机器人向上或向下楼梯的横向位置上。
机器人还可以识别其将执行的动作是上楼还是下楼,并基于不同的场景采取相应动作。
专利详细内容链接:https://patents.justia.com/patent/11073842
五、855、368专利:减少旋转惯性,实现高峰值转矩
其中855、368专利内容都为祖师机器人的螺旋驱动器。
机器人在运动时,腿部等多个构件会通过液压或者电机驱动来控制,这些驱动器的设计也会决定机器人运动的效果,例如机器人接收命令或者遇到外部干扰时的响应速度。其中包括驱动器的转动惯量和与其耦合的传动装置齿轮比等。
该专利公开的是用于足式机器人的螺旋驱动器实施方法,螺旋驱动器位于机器人腿部上方构件内,并且具有与螺旋杆同轴安装的螺母,能使螺旋杆在螺母内旋转。电机则安装在机器人大腿构件内部,并连接至螺旋杆,然后通过与大腿和小腿中间位置的膝关节进行连接。

在电机驱动的机器人里,采用螺旋驱动器就可以减少机器人构件的旋转惯性,以允许其实现高峰值转矩,让高性能机器人产生足够高的加速度。
专利详细内容链接:https://patents.justia.com/patent/10253855(855专利)
https://patents.justia.com/patent/11131368(368专利)
结语:机器人研发需一步一脚印
如今,机器人产业发展脉络逐渐成熟,双足、四足等各种形态的机器人层出不穷,但即便如此这一产业还仍然处于发展初期,在硬件、软件上仍有多道技术难题需要破解。
不可否认的是,波士顿动力一直以来都是机器人行业的领头羊。1992年,该公司从麻省理工学院(MIT)分拆出来,至今已经在全球成功申请了大约500项专利。作为技术的集大成者,与其在资金、时间、人才上的投入密不可分。
迄今的机器人研发,距离我们想象的帮我们做重复、单调、危险的工作还有很久,未来机器人发展仍需在先进技术和研发上不断投入。只有将基础研发打扎实,机器人产业才能迎来健康发展,向人类科技发展的星辰大海迈进。
来源:The Robot Report、美国专利局官网
【相关文章】
★ 特斯拉机器人全球首秀,3至5年可量产上市!万亿级市场或引爆
★ 篮网接下来11战有9个主场!沃恩:每个晚上都得带着目标感打球
★ 立讯精密披露337调查终裁结果:未对公司生产经营造成实质影响
★ 热搜!“含连花清瘟口罩”要来了?专利说明书称用以“提高人体免疫力”
本文地址:https://www.qubaike.com/hotnews/ponzxkmb.html
声明:本文信息为网友自行发布旨在分享与大家阅读学习,文中的观点和立场与本站无关,如对文中内容有异议请联系处理。